二进制
.DS_Store
二进制
User Study/.DS_Store
二进制
User Study/Google Form/.DS_Store
+ 3
- 0
User Study/Google Form/Hector V2 Nutzerstudie.csv
|
||
|
||
|
||
|
||
二进制
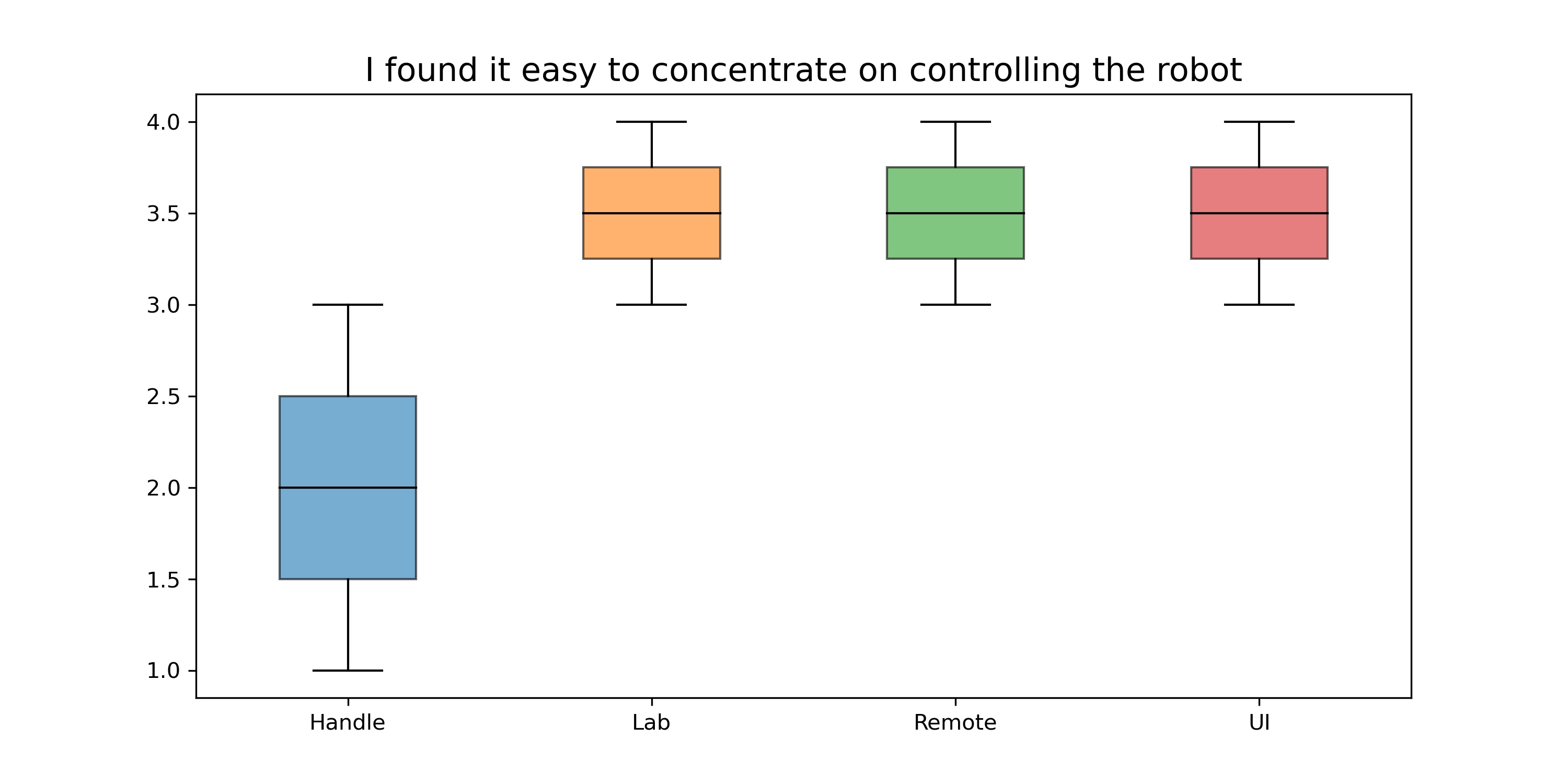
User Study/Google Form/I found it easy to concentrate on controlling the robot.jpg
{kind=link}
二进制
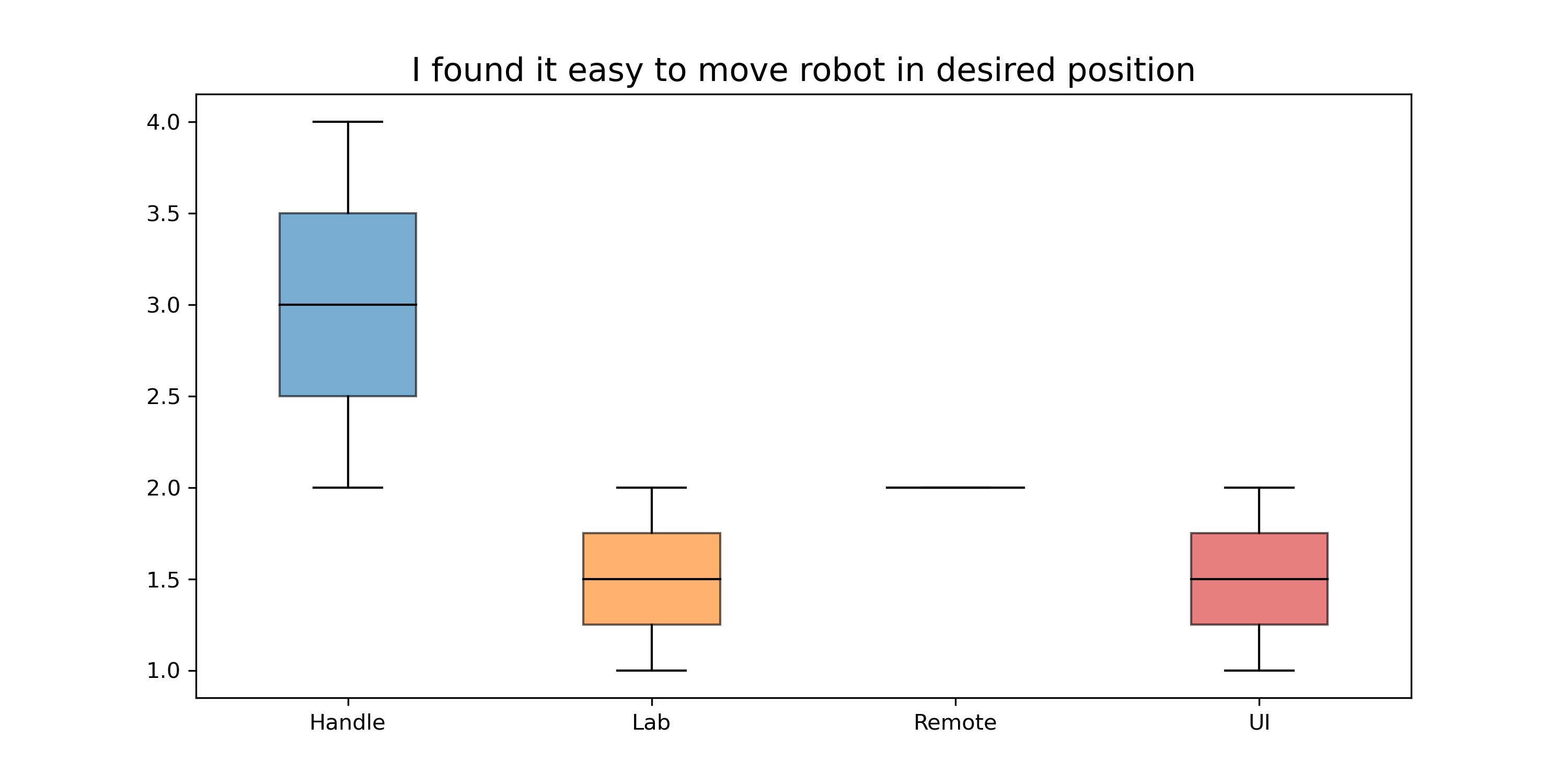
User Study/Google Form/I found it easy to move robot in desired position.jpg
{kind=link}
二进制
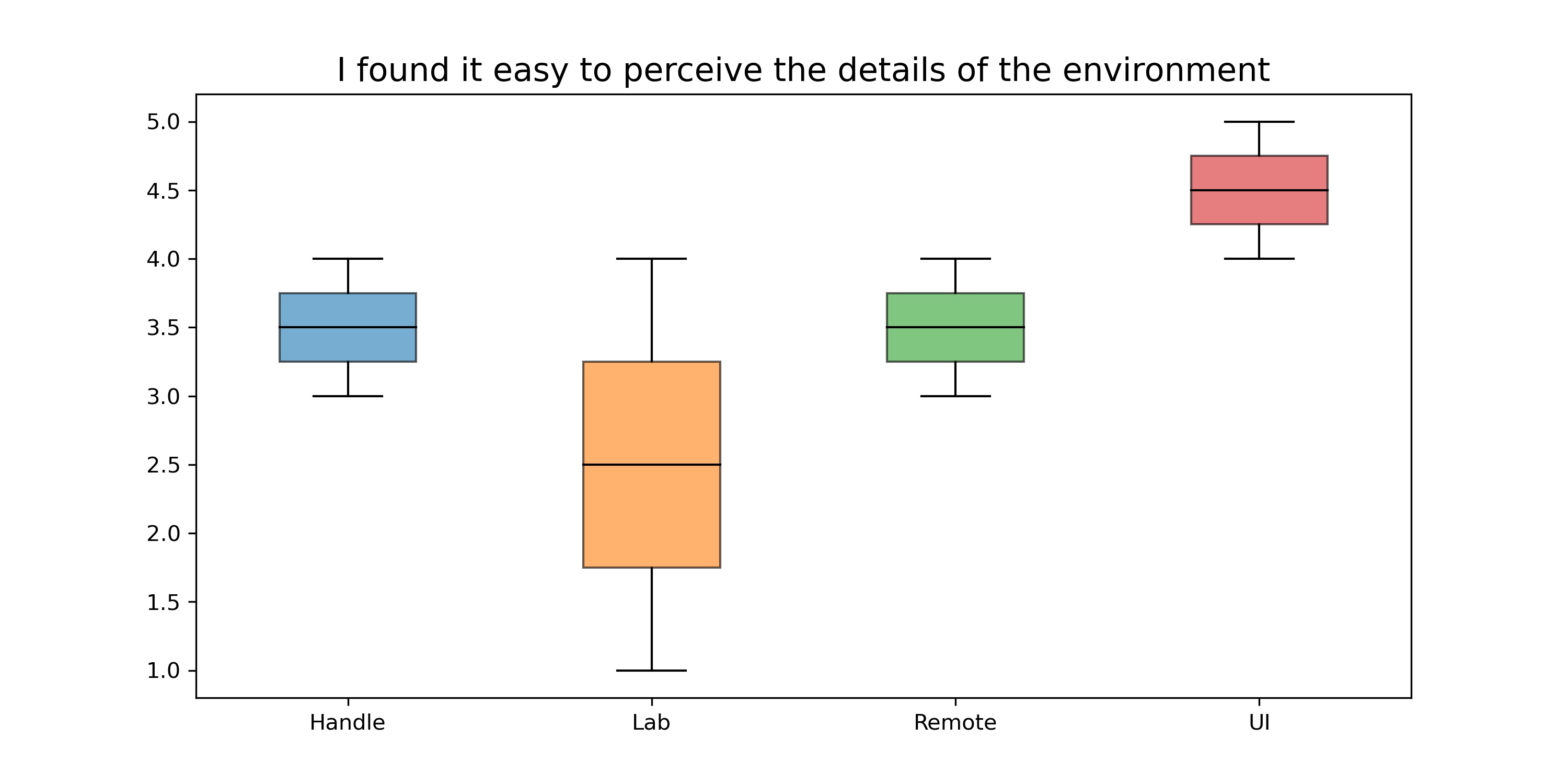
User Study/Google Form/I found it easy to perceive the details of the environment.jpg
{kind=link}
+ 64
- 0
User Study/Google Form/statistic.py
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
二进制
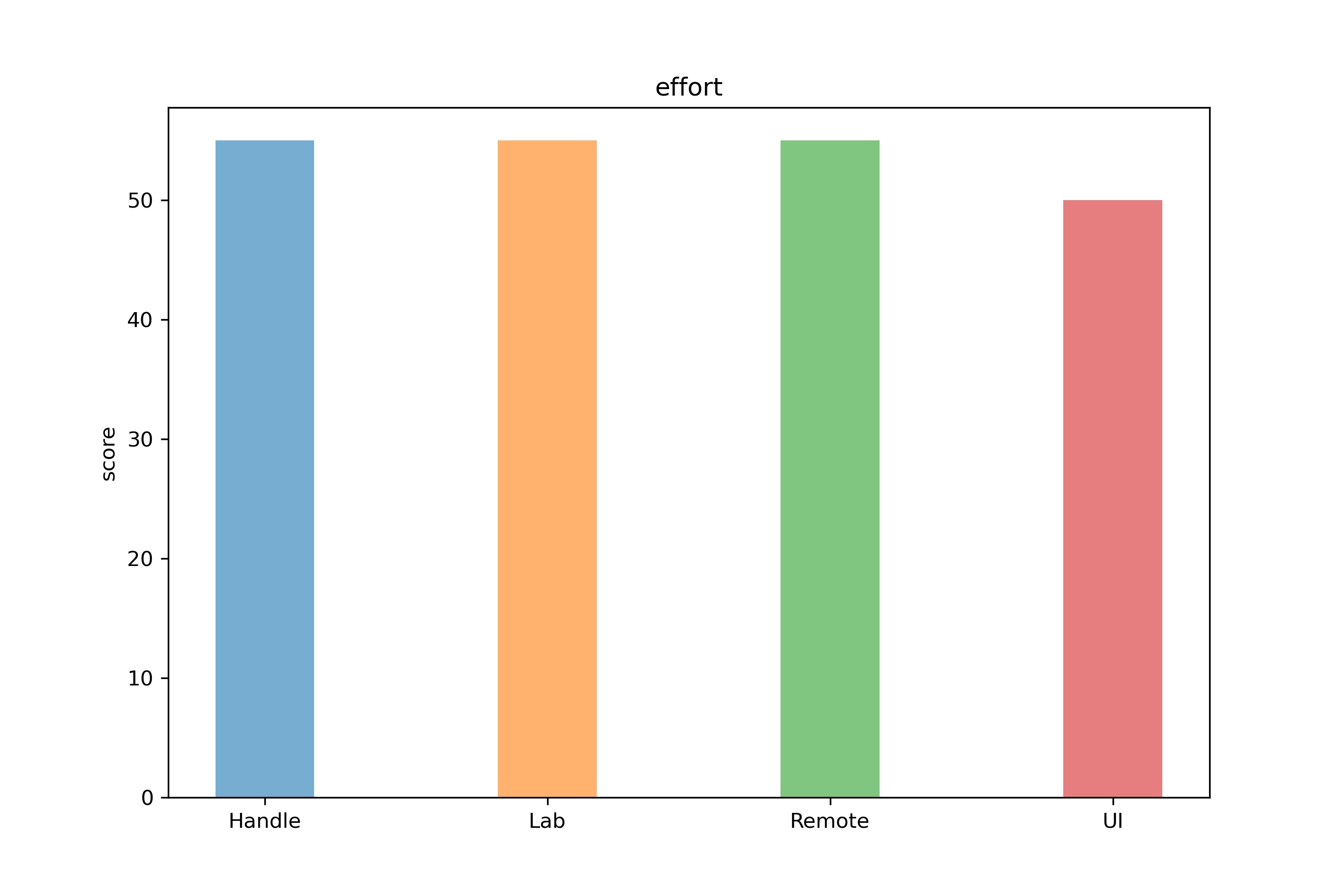
User Study/TLX/effort.jpg
{kind=link}
二进制
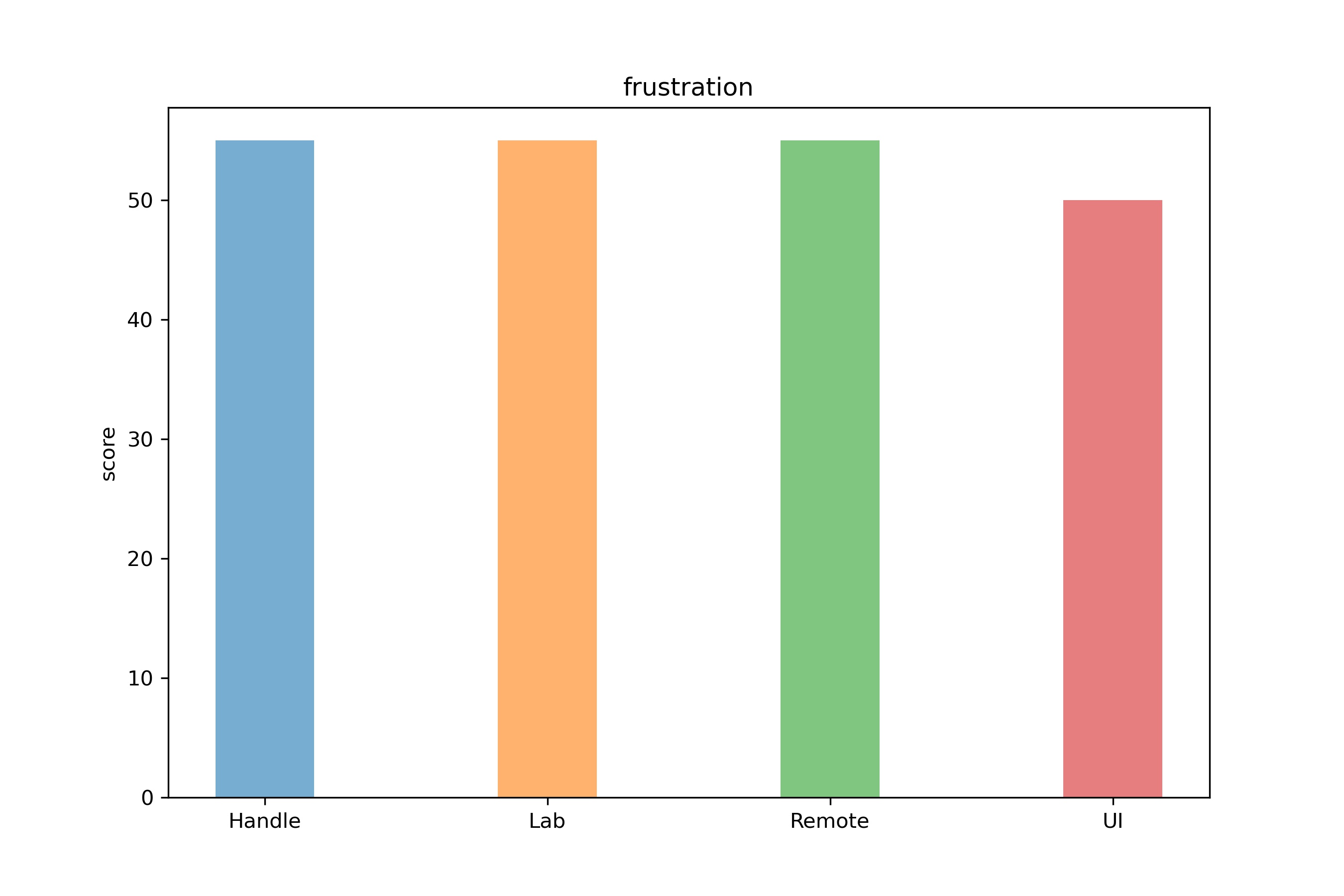
User Study/TLX/frustration.jpg
{kind=link}
二进制
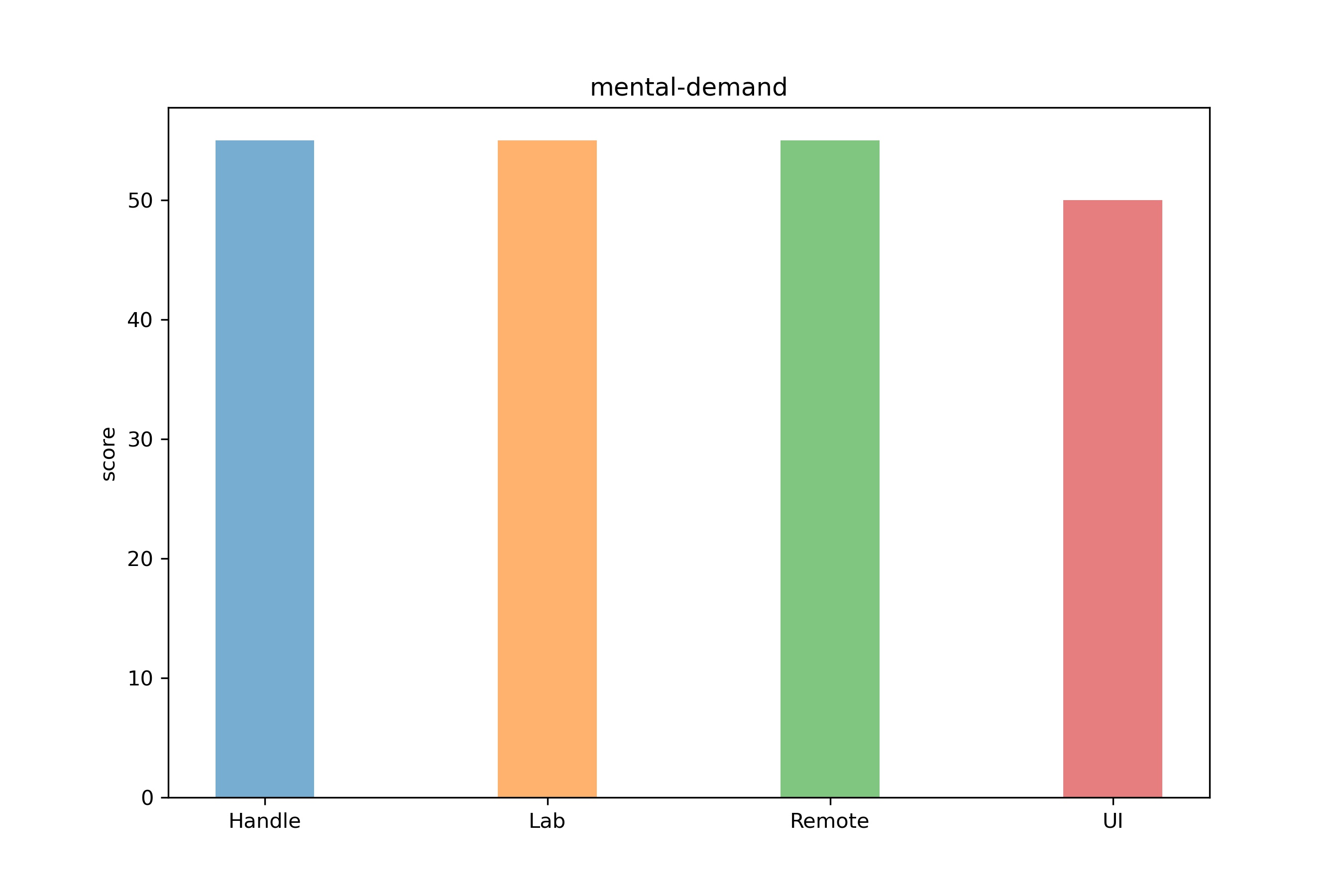
User Study/TLX/mental-demand.jpg
{kind=link}
二进制
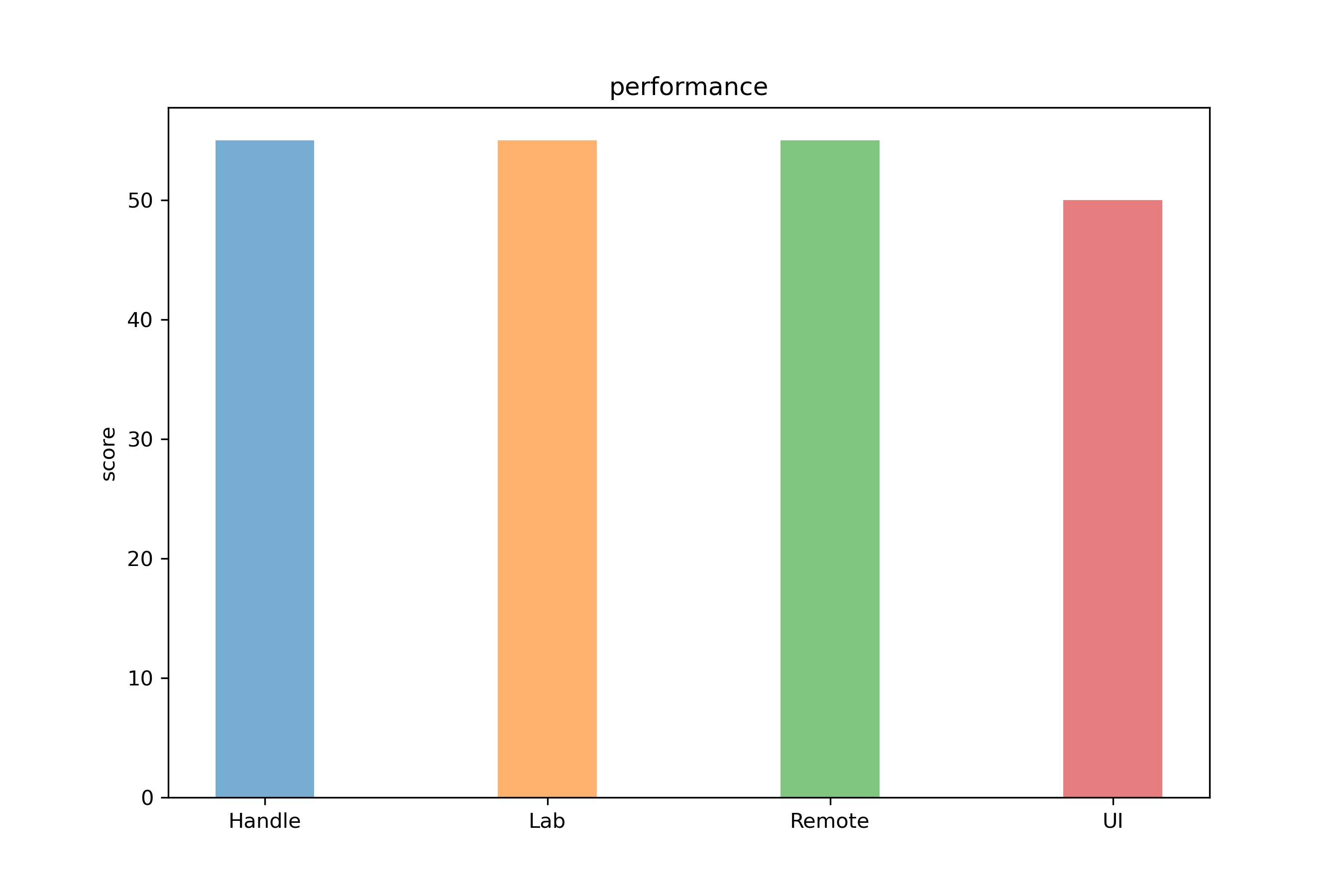
User Study/TLX/performance.jpg
{kind=link}
二进制
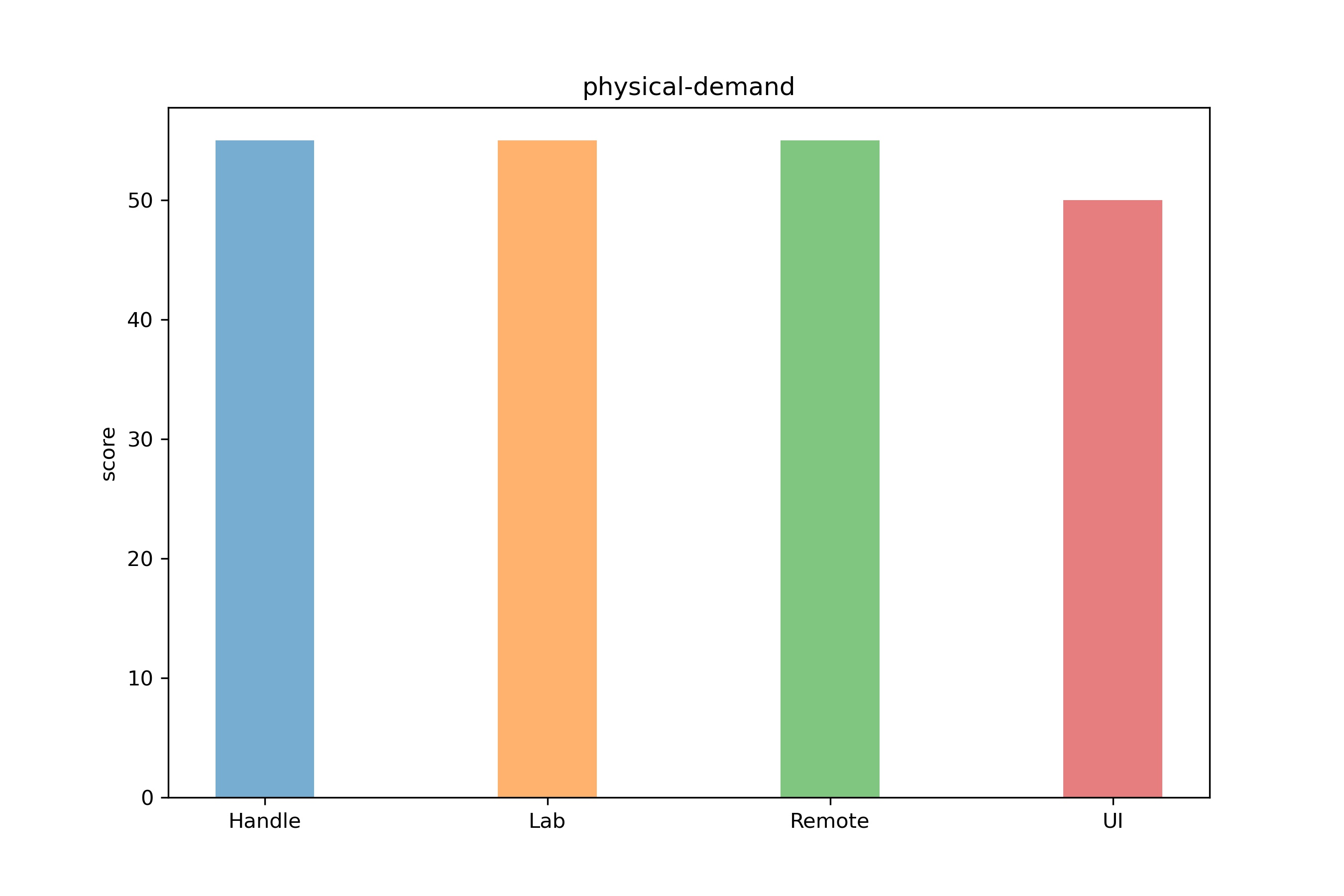
User Study/TLX/physical-demand.jpg
{kind=link}
+ 5
- 5
User Study/TLX/statistic.py
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
二进制
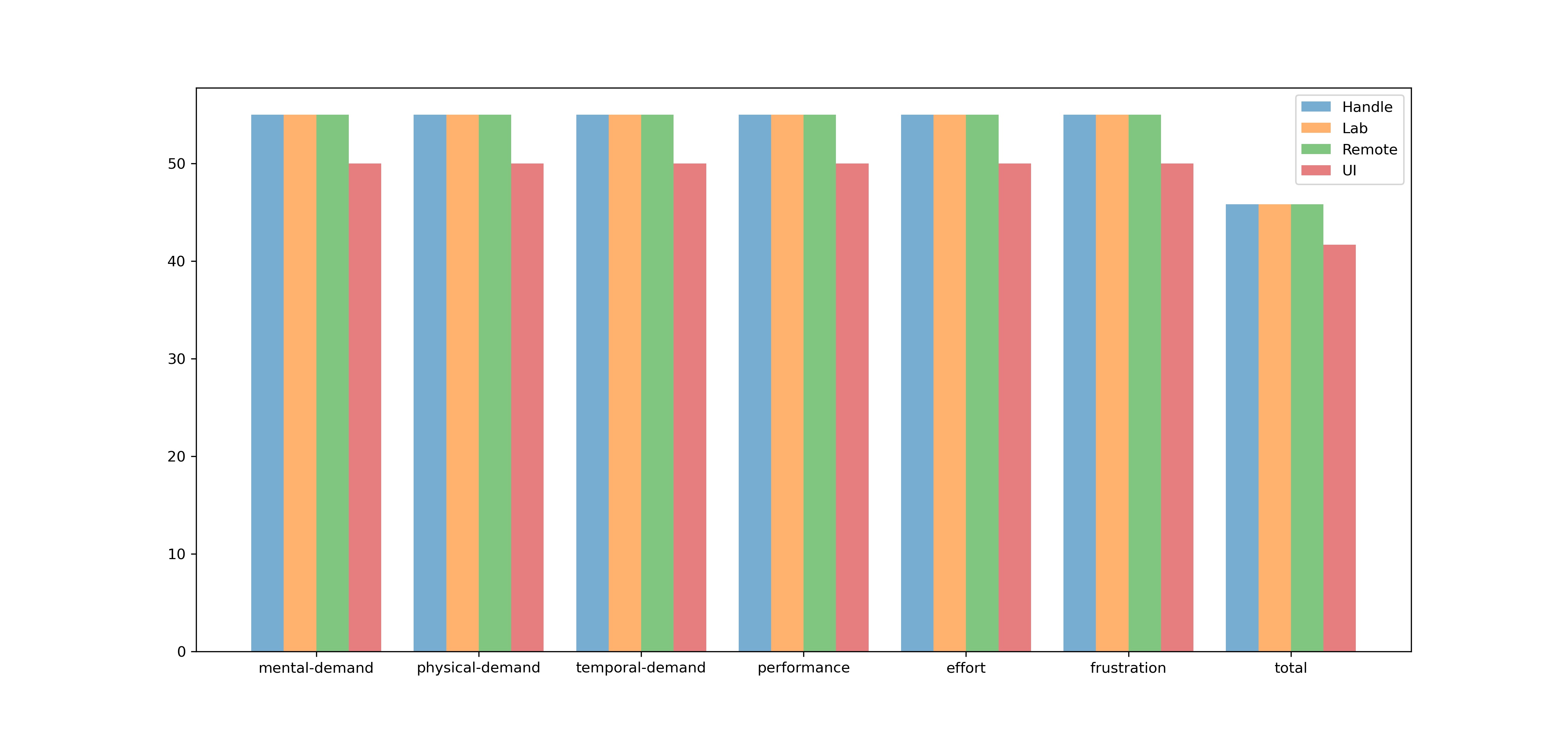
User Study/TLX/summary.jpg
{kind=link}
二进制
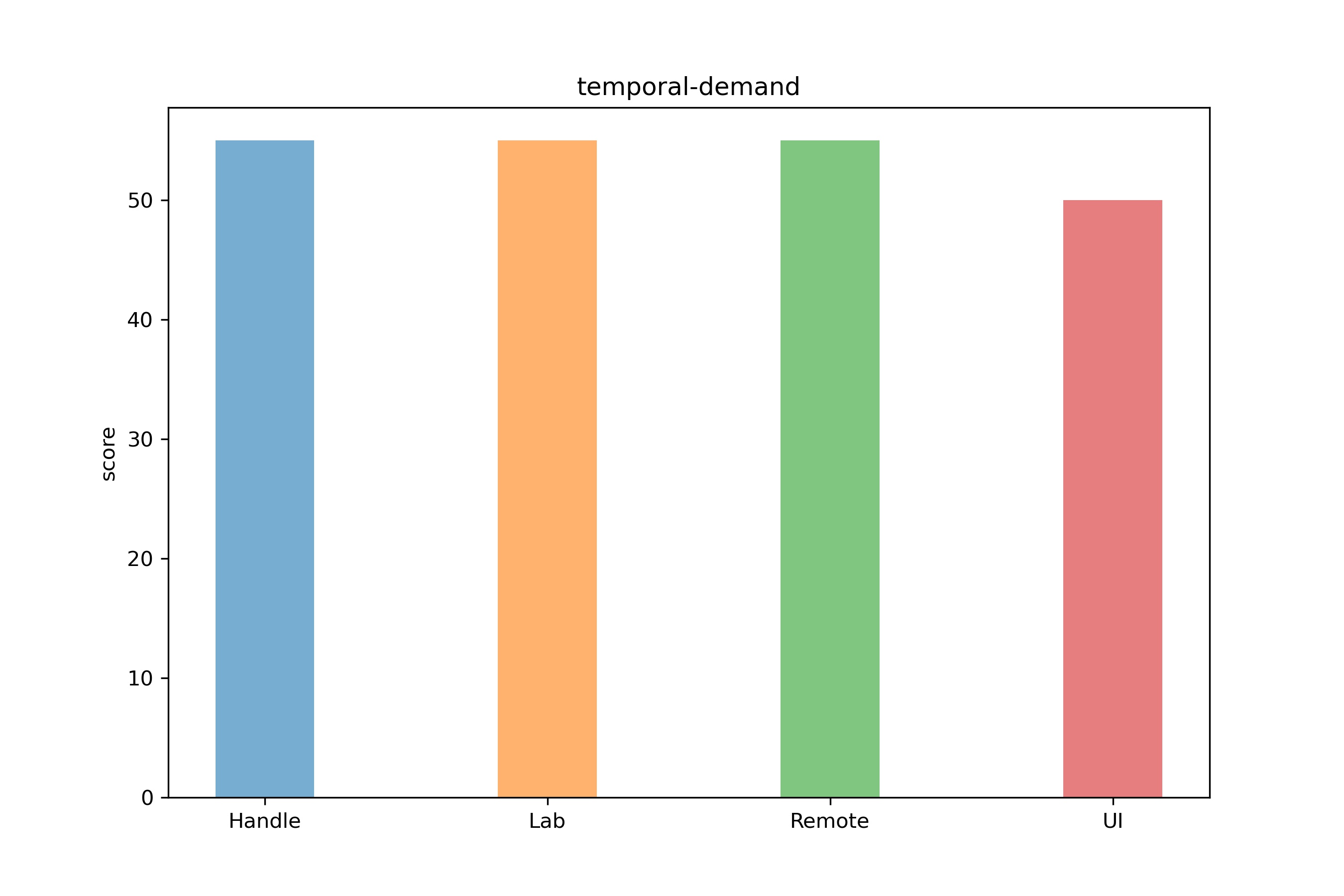
User Study/TLX/temporal-demand.jpg
{kind=link}
二进制
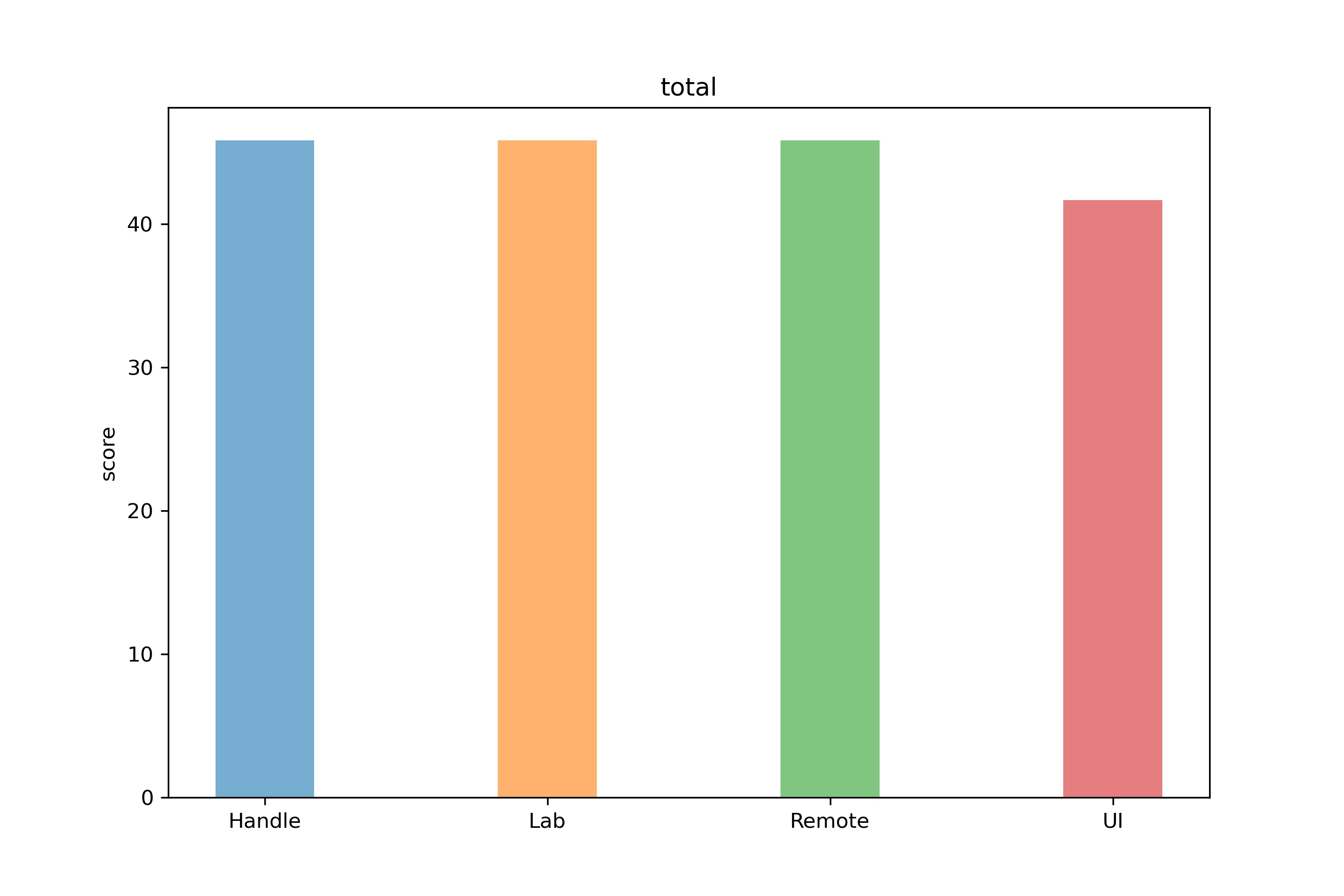
User Study/TLX/total.jpg
{kind=link}
二进制
User Study/TestResult/.DS_Store
+ 5
- 2
User Study/TestResult/0.csv
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
二进制
User Study/TestResult/Adverage speed.jpg
{kind=link}
二进制
User Study/TestResult/Collision.jpg
{kind=link}
二进制
User Study/TestResult/Drive Distance.jpg
{kind=link}
+ 6
- 0
User Study/TestResult/Mean.csv
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 25
- 0
User Study/TestResult/Merged.csv
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
二进制
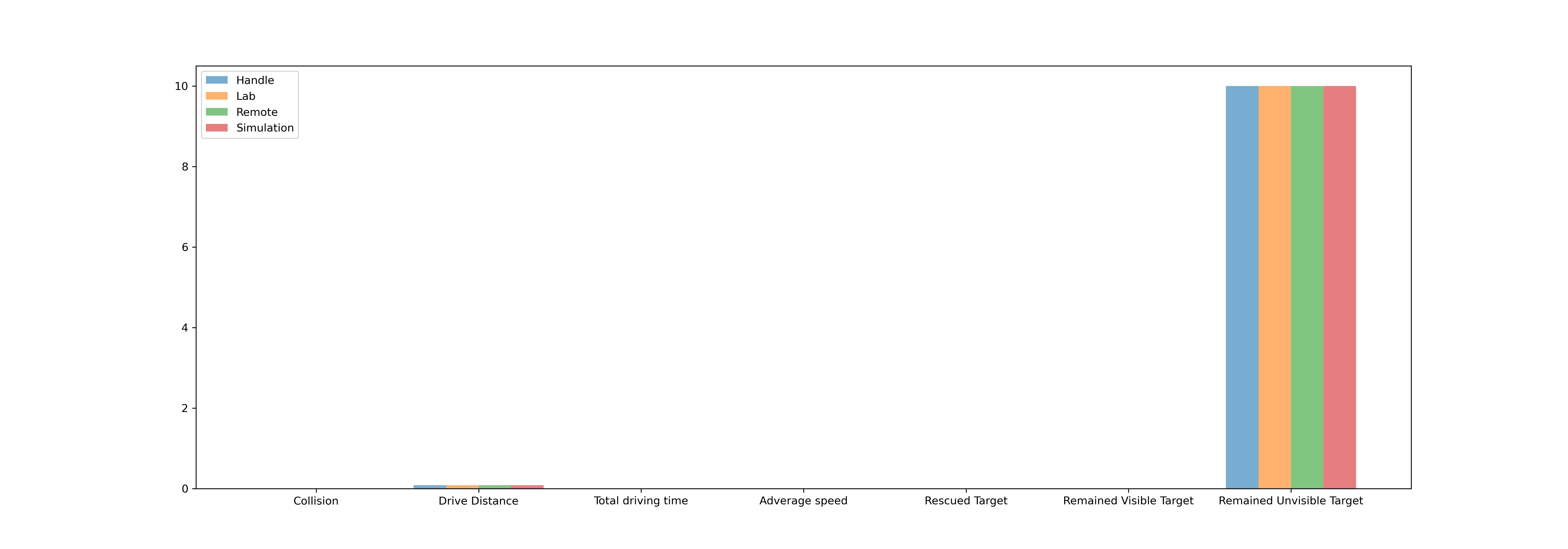
User Study/TestResult/Remained Unvisible Target.jpg
{kind=link}
二进制
User Study/TestResult/Remained Visible Target.jpg
{kind=link}
二进制
User Study/TestResult/Rescued Target.jpg
{kind=link}
二进制
User Study/TestResult/Total driving time.jpg
{kind=link}
+ 65
- 0
User Study/TestResult/statistic.py
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
二进制
User Study/TestResult/summary.jpg
{kind=link}