|
|
@@ -8,8 +8,12 @@ Ground-based rescue robot simulation with 4 operating modes and test scenarios
|
|
|
|
|
|
## Setup
|
|
|
|
|
|
+In theory, you can run the project directly by downloading and setting up SteamVR Input.
|
|
|
+
|
|
|
##### 0. Install
|
|
|
|
|
|
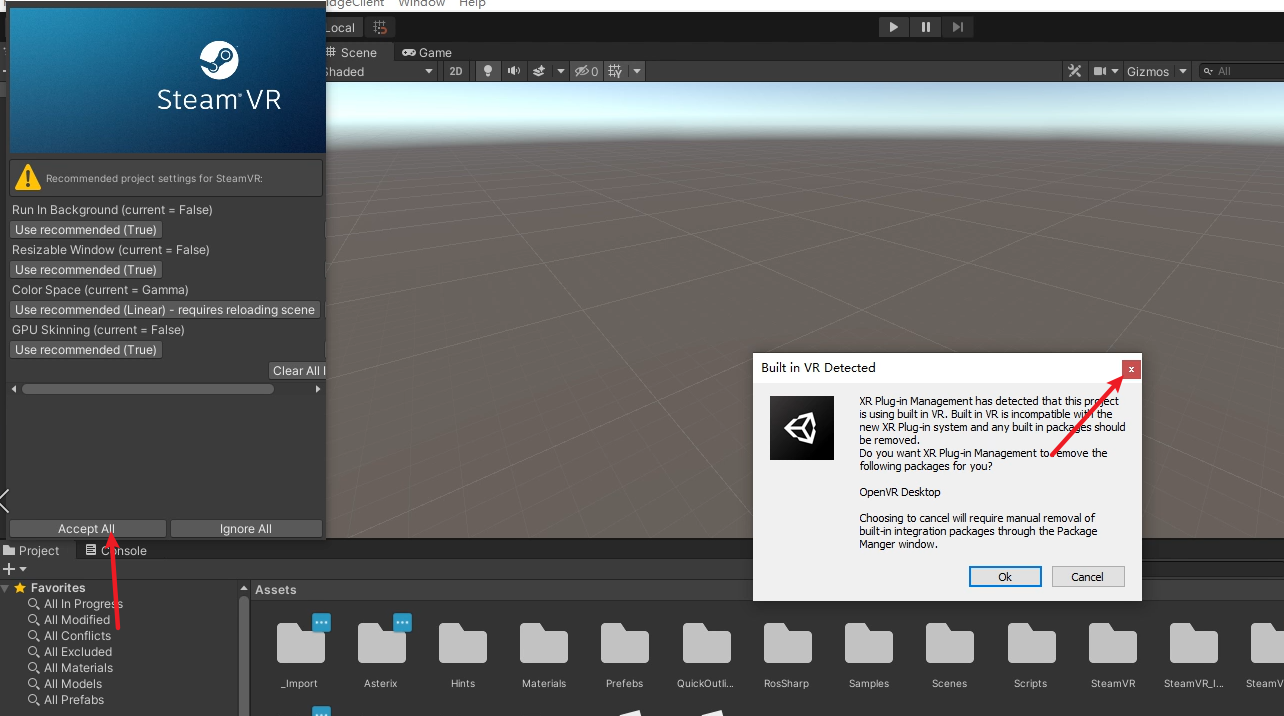
+For similar pop-up alerts please click:
|
|
|
+
|
|
|
|
|
|
|
|
|
|
|
|
@@ -22,7 +26,7 @@ Set SteamVR bindings under `Window>SteamVR Input>Open binding UI`
|
|
|
|
|
|
##### 2. Navmesh Agent
|
|
|
|
|
|
-The project uses the NavMesh to allow it to navigate the Scene, so please set the walkable area under `Window>AI>Navigation`.
|
|
|
+The project uses the NavMesh to allow it to navigate the Scene. Please make sure there is a corresponding Navmesh generated folder in the Scene folder, if the autowalk is not available after running, please re-bake the scene under `Window>AI>Navigation`.
|
|
|
|
|
|
The following scenarios need to be set: Simulation, RemoteTest and UITest.
|
|
|
|

