

47 changed files with 168 additions and 31 deletions
BIN
.DS_Store
BIN
Hector_v2/.DS_Store
BIN
Hector_v2/Assets/.DS_Store
BIN
Hector_v2/Library/.DS_Store
BIN
Hector_v2/obj/.DS_Store
+ 35
- 4
Thesis.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
User Study/.DS_Store
BIN
User Study/Google Form/.DS_Store
+ 10
- 3
User Study/Google Form/Hector V2 Nutzerstudie.csv
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
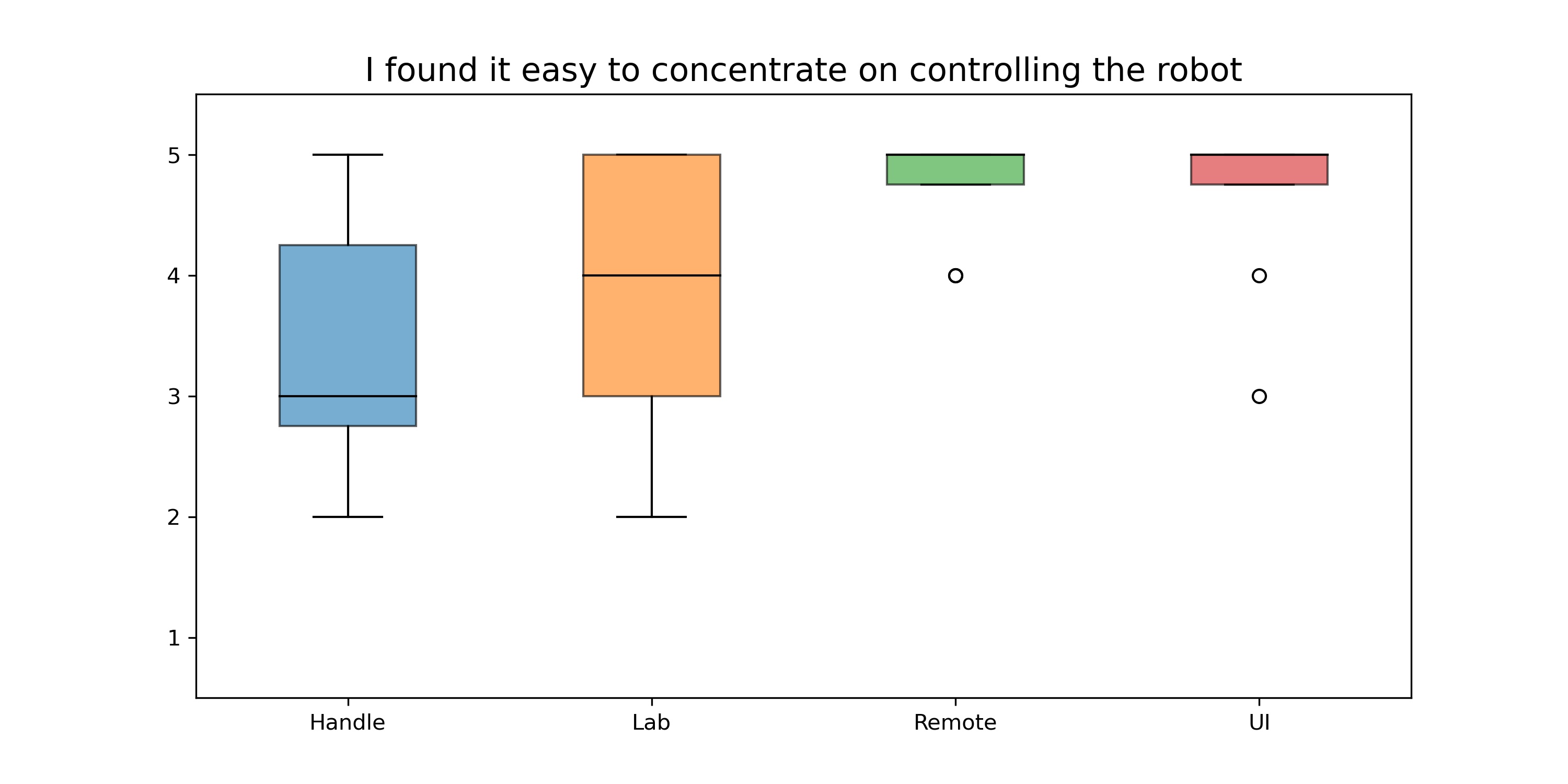
User Study/Google Form/I found it easy to concentrate on controlling the robot.jpg
{kind=link}
BIN
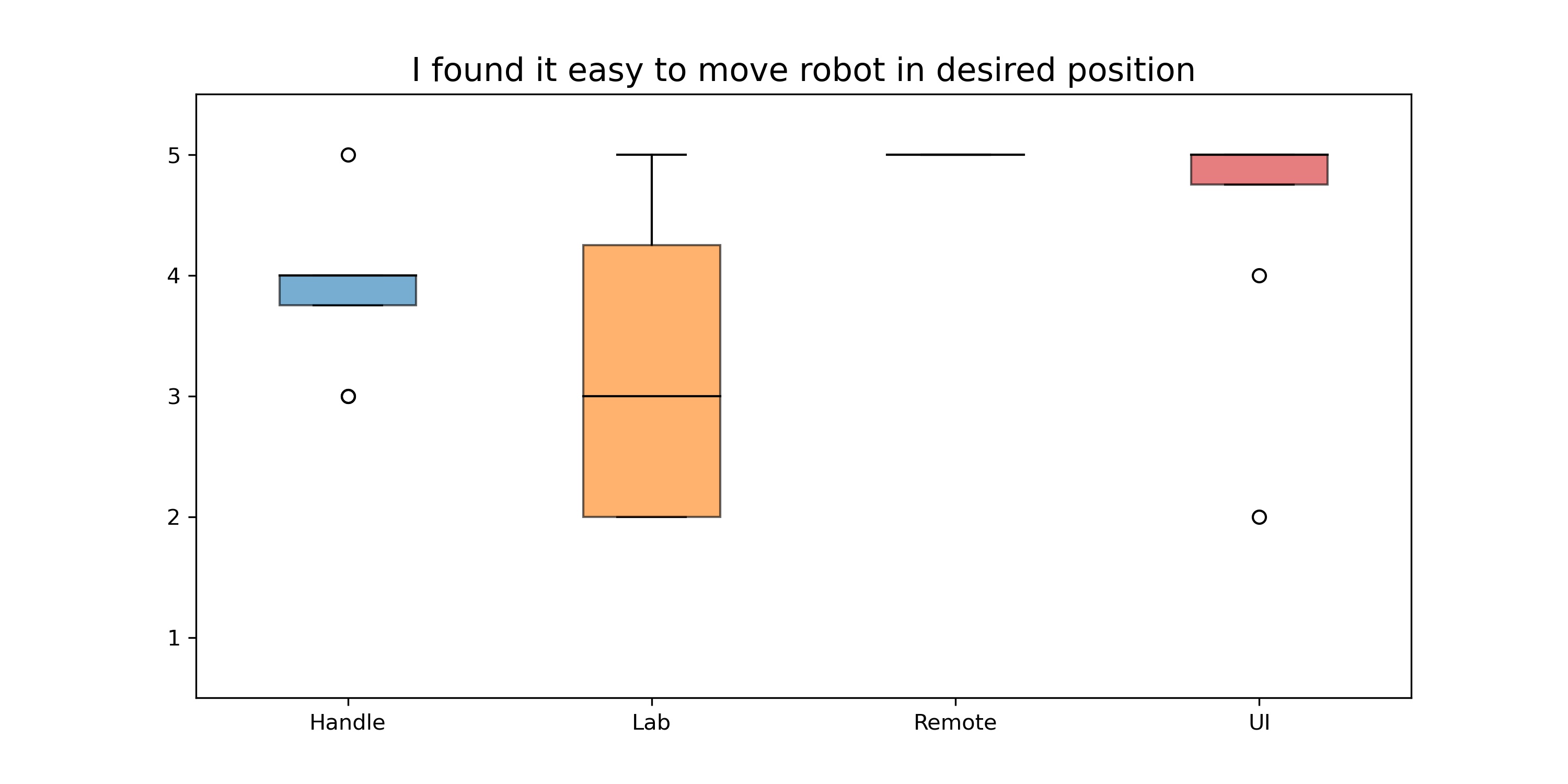
User Study/Google Form/I found it easy to move robot in desired position.jpg
{kind=link}
BIN
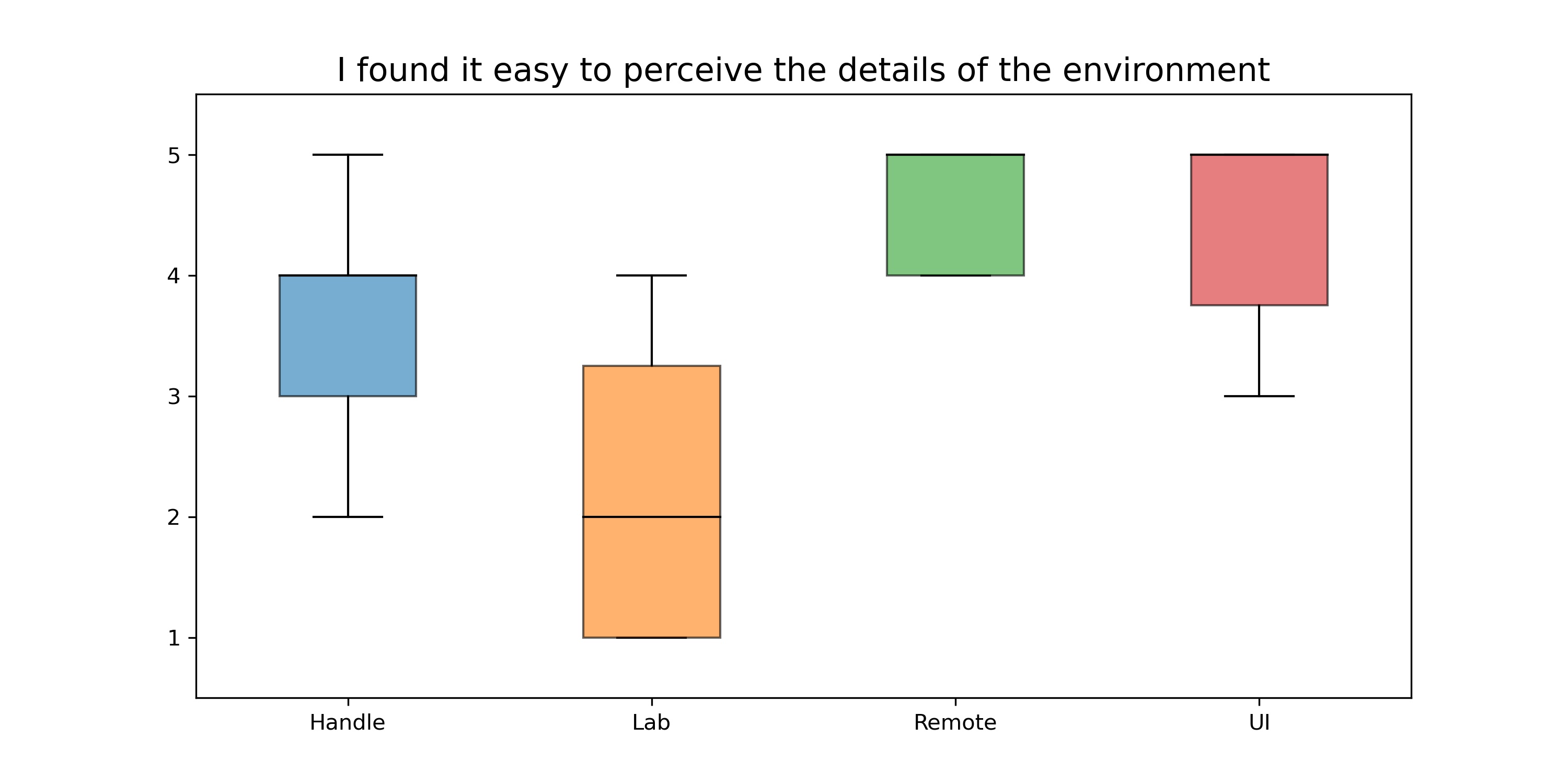
User Study/Google Form/I found it easy to perceive the details of the environment.jpg
{kind=link}
+ 1
- 0
User Study/Google Form/statistic.py
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 5
- 0
User Study/TLX/HectorVR-10.csv
|
||
|
||
|
||
|
||
|
||
|
||
+ 5
- 0
User Study/TLX/HectorVR-11.csv
|
||
|
||
|
||
|
||
|
||
|
||
+ 5
- 0
User Study/TLX/HectorVR-12.csv
|
||
|
||
|
||
|
||
|
||
|
||
+ 5
- 0
User Study/TLX/HectorVR-5.csv
|
||
|
||
|
||
|
||
|
||
|
||
+ 6
- 0
User Study/TLX/HectorVR-6.csv
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 5
- 0
User Study/TLX/HectorVR-7.csv
|
||
|
||
|
||
|
||
|
||
|
||
+ 4
- 0
User Study/TLX/HectorVR-8.csv
|
||
|
||
|
||
|
||
|
||
+ 5
- 0
User Study/TLX/HectorVR-9.csv
|
||
|
||
|
||
|
||
|
||
|
||
+ 5
- 0
User Study/TLX/Mean.csv
|
||
|
||
|
||
|
||
|
||
|
||
+ 33
- 0
User Study/TLX/Merged.csv
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
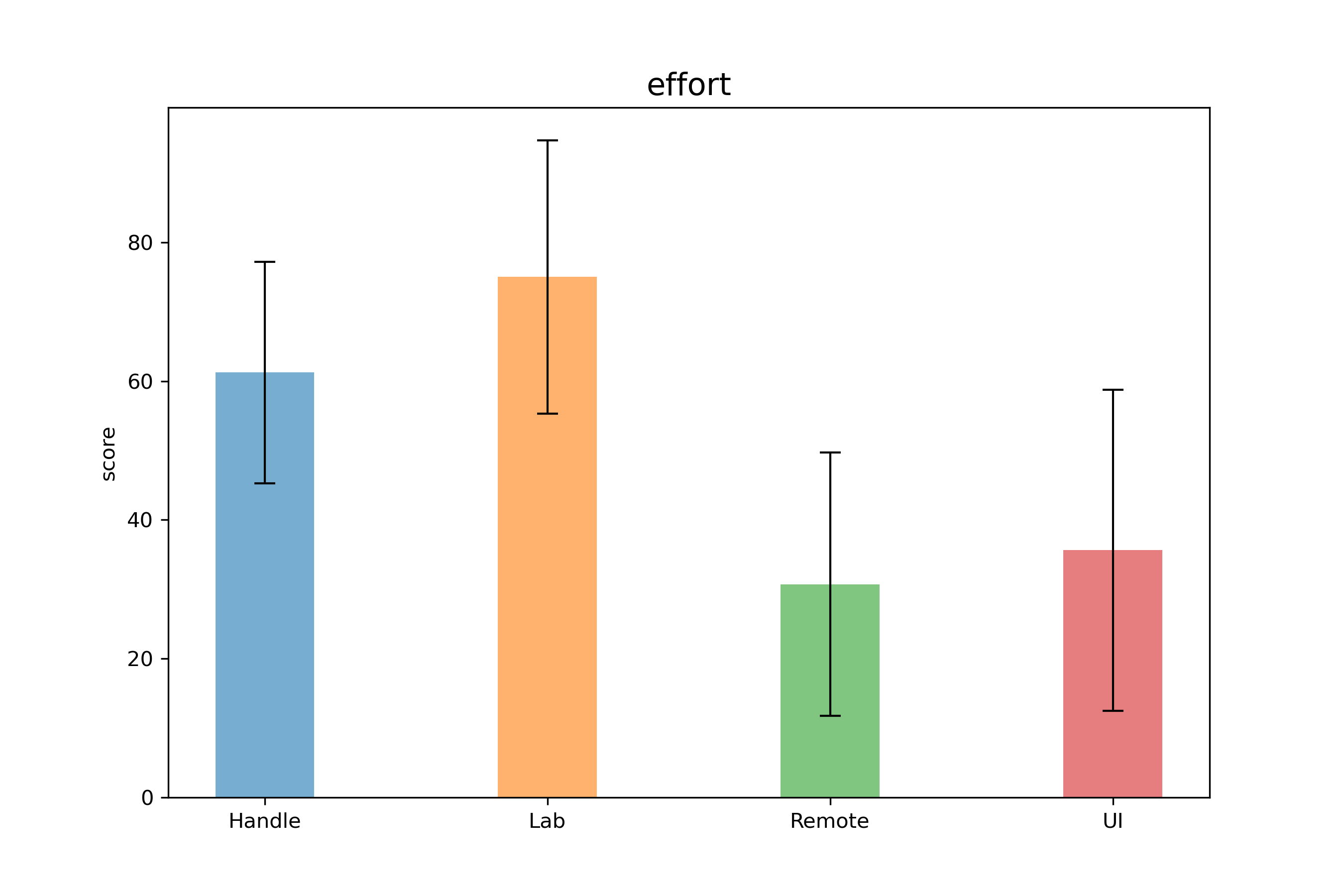
User Study/TLX/effort.png
{kind=link}
BIN
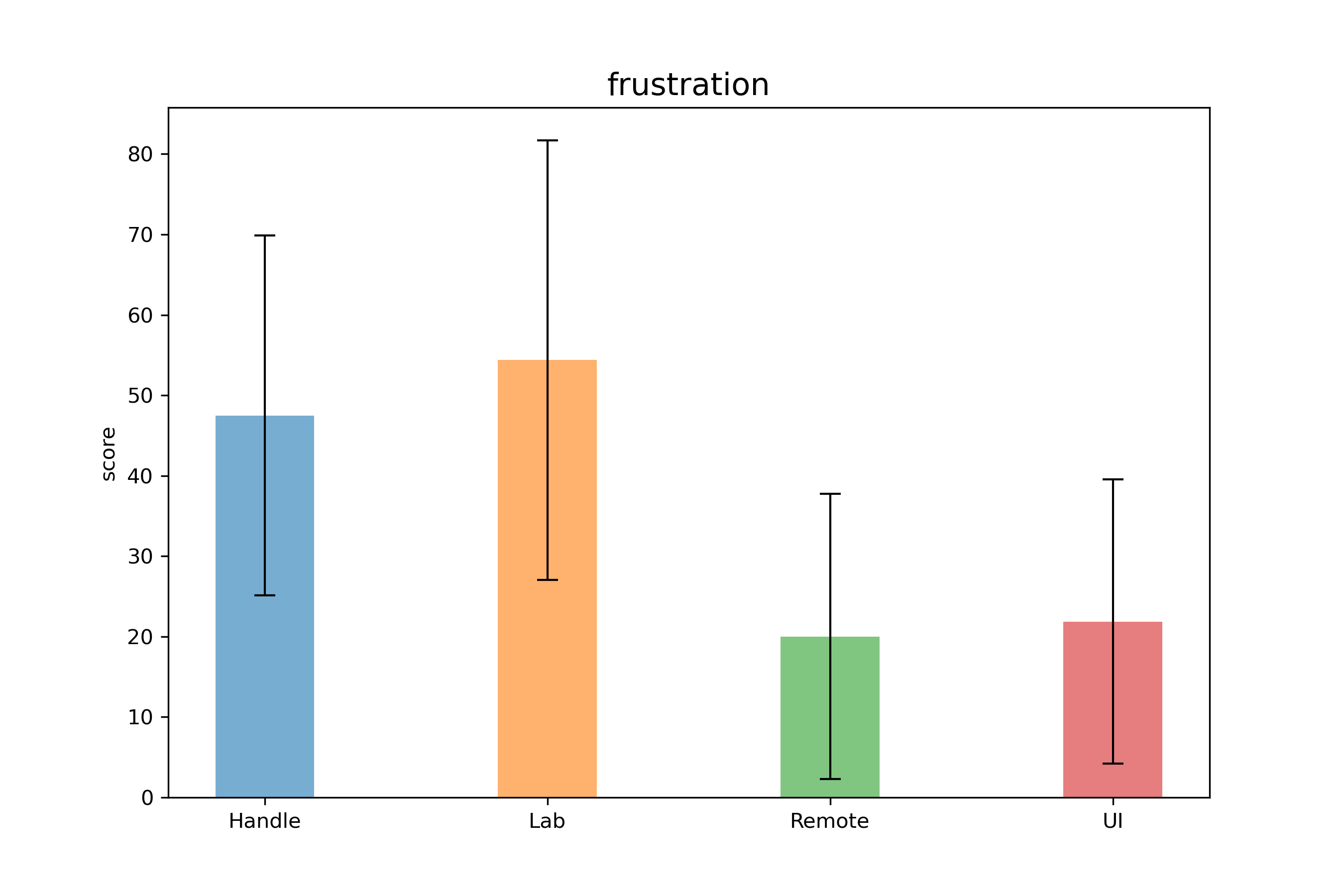
User Study/TLX/frustration.png
{kind=link}
BIN
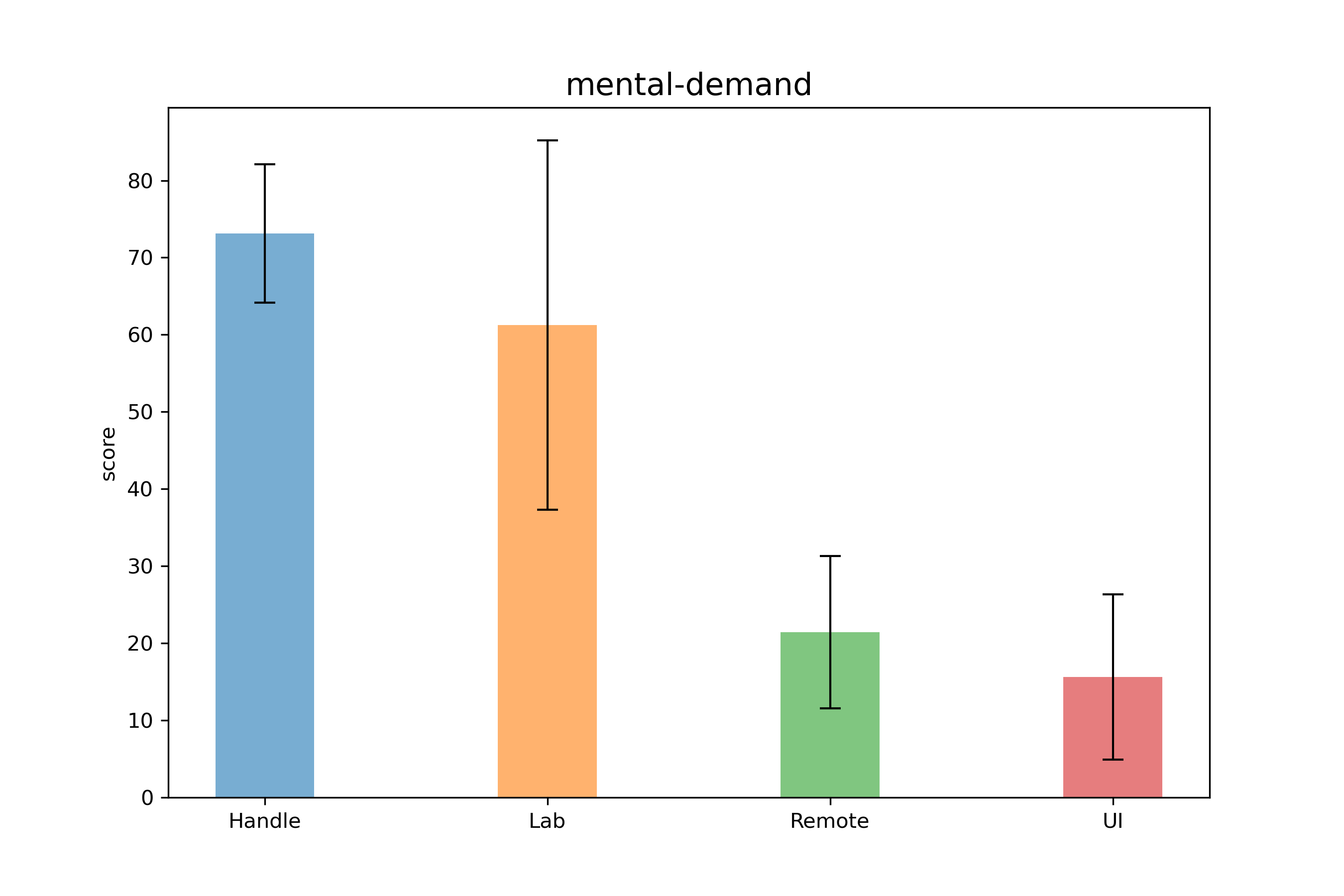
User Study/TLX/mental-demand.png
{kind=link}
BIN
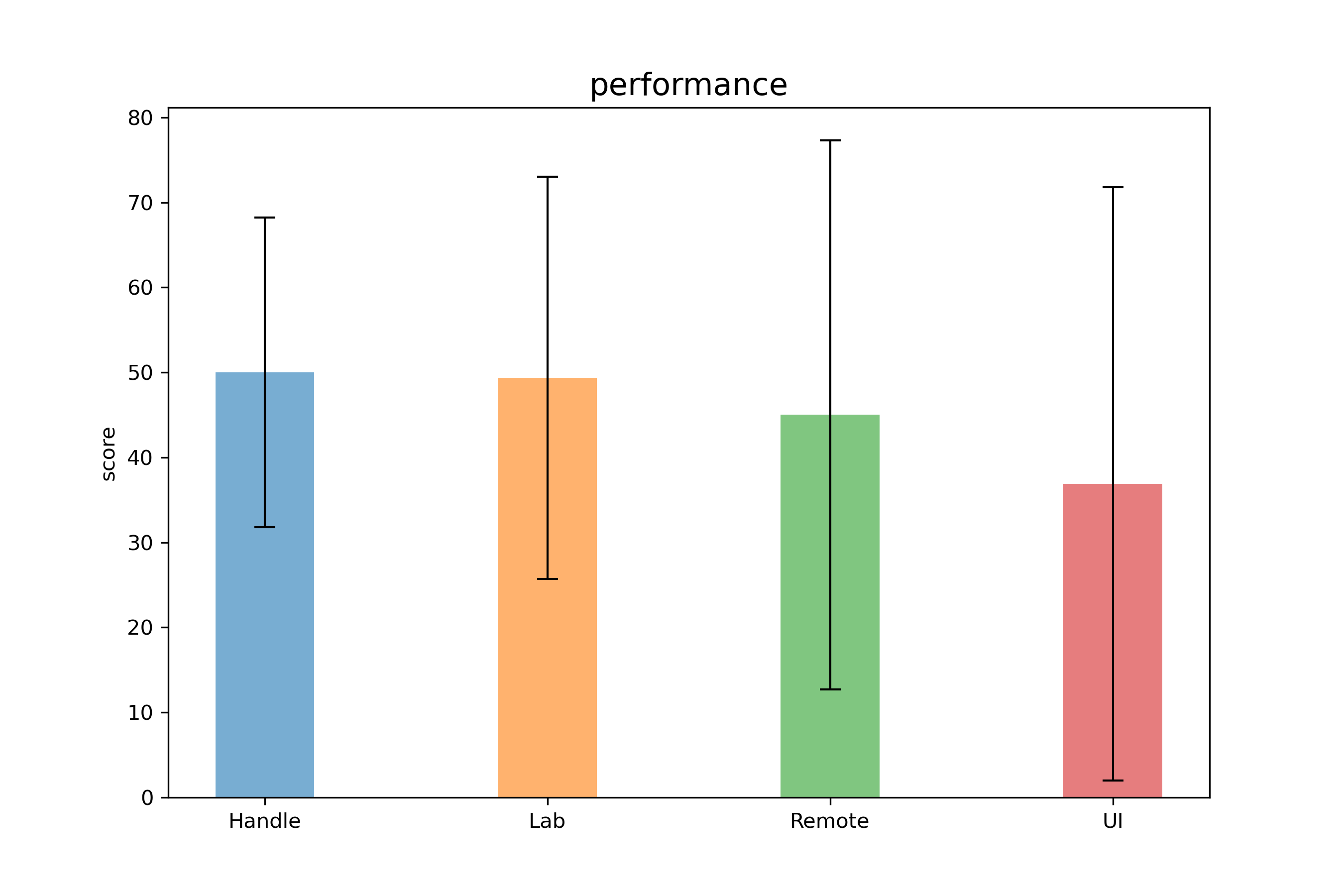
User Study/TLX/performance.png
{kind=link}
BIN
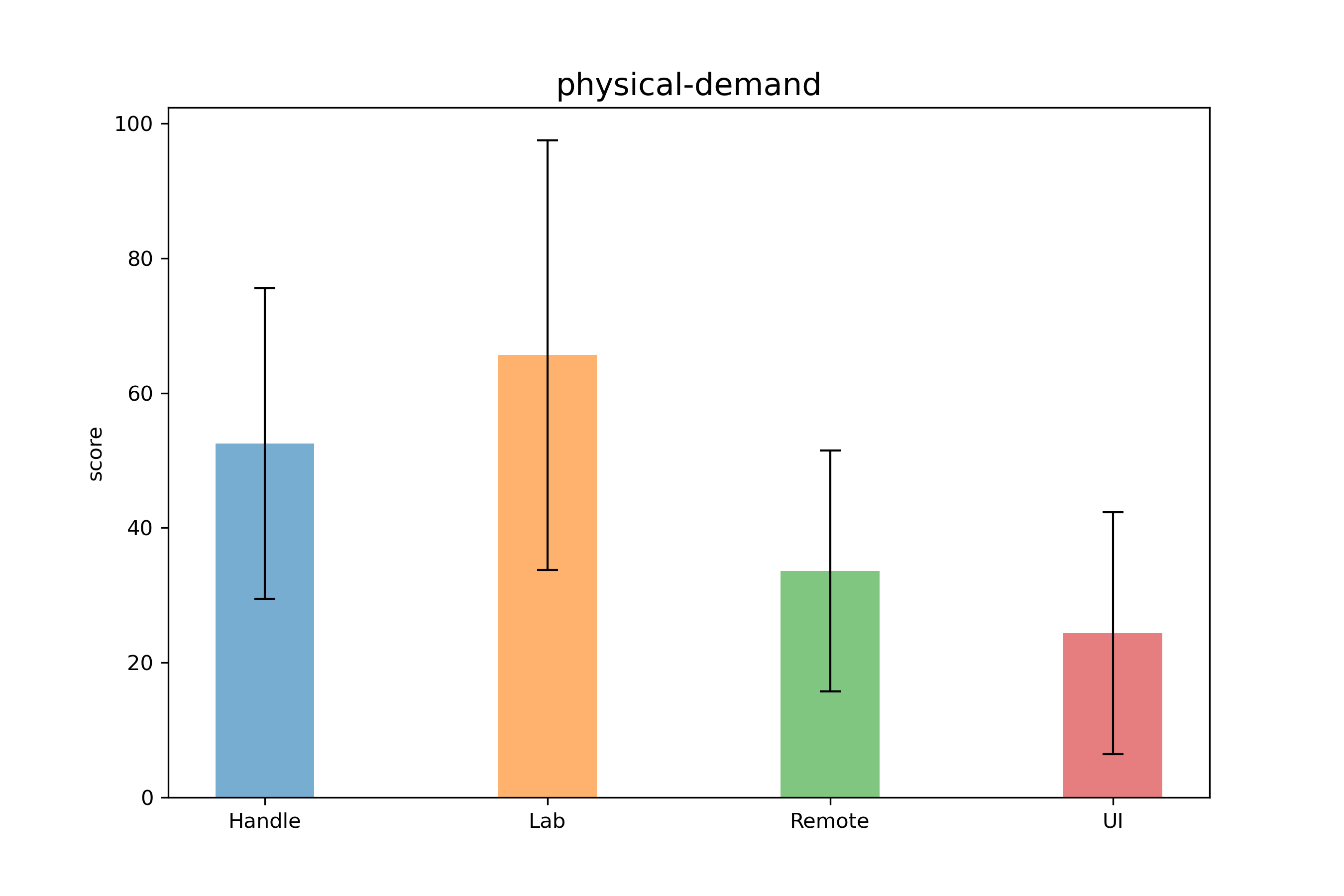
User Study/TLX/physical-demand.png
{kind=link}
+ 5
- 0
User Study/TLX/standard_deviation.csv
|
||
|
||
|
||
|
||
|
||
|
||
BIN
User Study/TLX/summary.jpg
{kind=link}
BIN
User Study/TLX/temporal-demand.png
{kind=link}
BIN
User Study/TLX/total.png
{kind=link}
BIN
User Study/TestResult/.DS_Store
+ 0
- 5
User Study/TestResult/1.csv
|
||
|
||
|
||
|
||
|
||
|
||
+ 5
- 0
User Study/TestResult/10.csv
|
||
|
||
|
||
|
||
|
||
|
||
+ 5
- 0
User Study/TestResult/11.csv
|
||
|
||
|
||
|
||
|
||
|
||
+ 5
- 0
User Study/TestResult/12.csv
|
||
|
||
|
||
|
||
|
||
|
||
+ 0
- 5
User Study/TestResult/2.csv
|
||
|
||
|
||
|
||
|
||
|
||
+ 0
- 5
User Study/TestResult/3.csv
|
||
|
||
|
||
|
||
|
||
|
||
+ 0
- 5
User Study/TestResult/4.csv
|
||
|
||
|
||
|
||
|
||
|
||
+ 5
- 0
User Study/TestResult/6.csv
|
||
|
||
|
||
|
||
|
||
|
||
+ 5
- 0
User Study/TestResult/7.csv
|
||
|
||
|
||
|
||
|
||
|
||
+ 5
- 0
User Study/TestResult/8.csv
|
||
|
||
|
||
|
||
|
||
|
||
+ 5
- 0
User Study/TestResult/9.csv
|
||
|
||
|
||
|
||
|
||
|
||
BIN
User Study/TestResult/Rescue situation.png
{kind=link}
BIN
User Study/TestResult/Robot Performance.png
{kind=link}
+ 4
- 4
User Study/TestResult/statistic.py
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||